Segmentation¶
The package provides operators and classes useful for segmenting camera frames:
- SegmentedFrame is the class used to store segmented frames. It also provides utilities to transform a frame between different encodings (e.g., CARLA, Cityscapes), and to compute accuracy metrics (e.g., mIoU).
- SegmentationDRNOperator is an operator that uses the DRN neural network to segment camera frames.
- SegmenationEvalOperator implements logic to evaluate the output of a segmentation operator. It receives data on two streams and computes intersection over union (IoU) between the frames tagged with the same timestamp.
Execute the following command to run a semantic segmentation demo:
python3 pylot.py --flagfile=configs/segmentation.conf
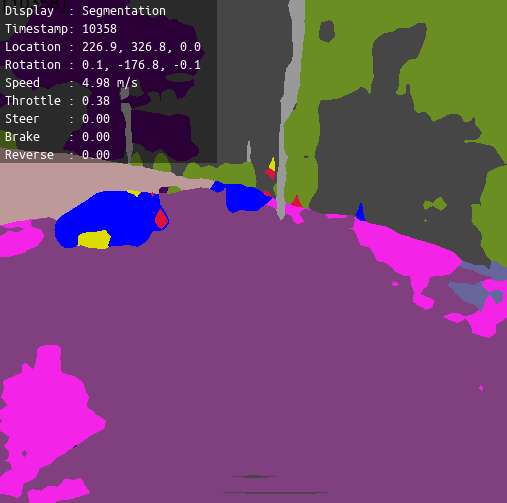
Note: The segmentation model we used has not been trained on CARLA data, and the output of the segmentation component is not currently used by any other Pylot components.
Important flags¶
--segmentation: Enables the segmentation component of the stack.--segmentation_model_path: File path to a trained DRN segmentation model.--perfect_segmentation: The component outputs perfectly segmented frames it receives from the simulator, instead of the results obtained using a trained model.--visualize_segmentation: Enables visualization of the output of the segmentation component.--evaluate_segmentation: Compute and log accuracy metrics of the segmentation component.--segmentation_metric: Sets the accuracy metric the SegmentationEvalOperator computes.