Visualization¶
Important flags¶
The following flags can be set to enable visualization of the output and state
of the different Pylot components. The visualization is done in a pygame window,
and users can switch between different views by pressing n.
--visualize_rgb_camera: Enables the visualization of the camera.--visualize_depth_camera: Enables the visualization of the depth estimation.--visualize_lidar: Enables top down visualization of the LiDAR.--visualize_detected_obstacles: Enables visualization of detected obstacles.--visualize_detected_traffic_lights: Enables visualization of detected traffic lights.--visualize_detected_lanes: Enables visualization of detected lanes.--visualize_tracked_obstacles: Enables the visualization of tracked obstacles. The visualization includes info such as: id of the obstacle, distance from ego vehicle, label.--visualize_segmentation: Enables the visualization of segmented frames.--visualize_waypoints: Enables the visualization of the waypoints output by the planning component. These waypoints can be drawn on the camera frame (pass-draw_waypoints_on_camera_frames), or directly in the simulator when running in simulation mode (pass--draw_waypoints_on_world).--visualize_world: Enables visualization of the current state of the ego-vehicle. This is the best way to visualize what the self-driving car is currently perceiving and predicting. This visualization includes the past trajectories and predicted future trajectories of other agents, detected traffic lights and lanes, and the waypoints the ego-vehicle is trying to follow.
Flags that only work when running in simulation:
--visualize_imu: Enables visualization of the IMU.--visualize_pose: Enables the visualization of the ego-vehicle pose.--visualize_prediction: Enables the visualization of obstacle predictions.
Examples¶
Obstacle detection:

Traffic light detection:

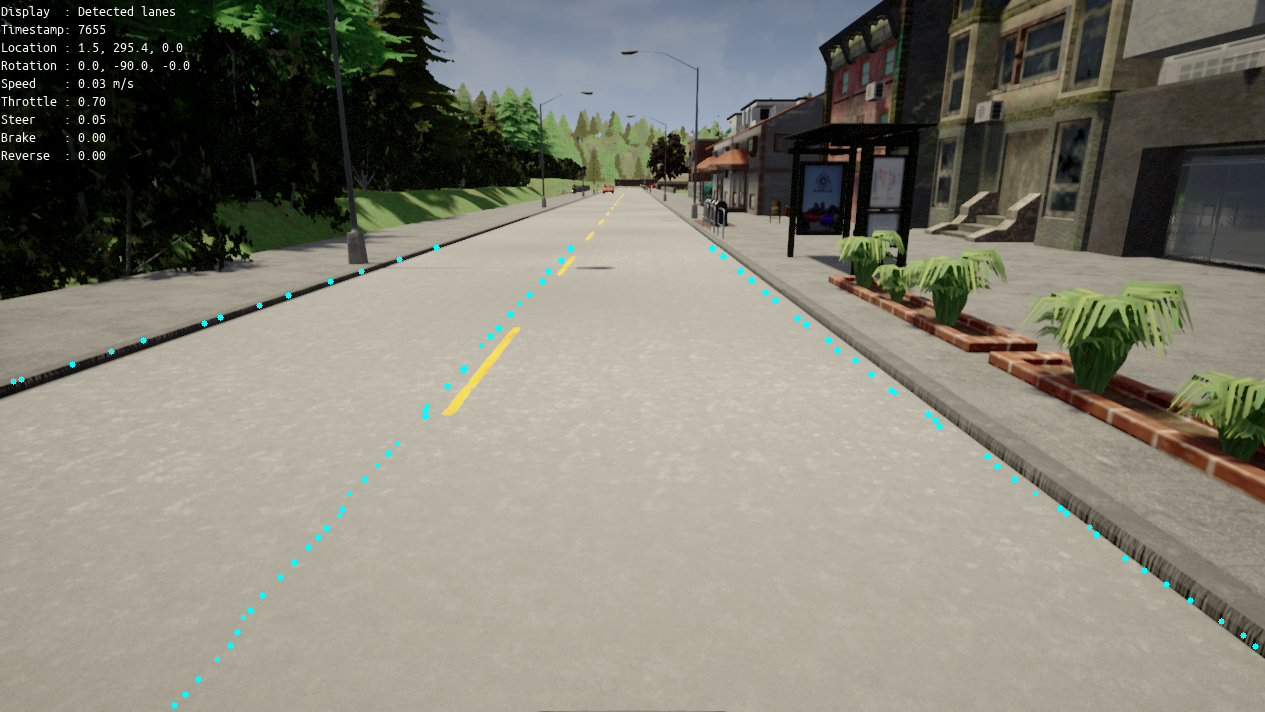
Lane detection:
Planning waypoints:

Planning world:
In this visualization the ego-vehicle is driving forward at 9.0 meters per second, the vehicle on the opposite lane is stationary, and the prediction component predicts that the predestrian will cross the street.
