Detection¶
The package provides operators and classes useful for detecting obstacles, traffic lights and lanes. It provides operators that use trained models and algorithms, as well as operators that use data from the simulator to perfectly detect obstacles, traffic lights, and lanes.
Obstacle detection¶
Pylot provides two options for obstacle detection:
- An obstacle detection operator that can use any model that adheres to the Tensorflow object detection model zoo. By default, we provide three models that were trained on 1080p CARLA images (
faster-rcnn,ssd-mobilenet-fpn-640, andssdlit-mobilenet-v2), but models that have been trained on other data sets can be easily plugged in by changing the--obstacle_detection_model_pathsflag.- An operator that can infer any of the EfficientDet models. The EfficientDet models we use are not trained on CARLA data, but on the COCO data set.
To see a demo of obstacle detection run:
python3 pylot.py --flagfile=configs/detection.conf

Traffic light detection¶
The traffic light detection component uses Faster RCNN weight, which have been trained on 1080p CARLA images.
To see a demo of traffic light detection run:
python3 pylot.py --flagfile=configs/traffic_light.conf

Lane detection¶
To see a demo of lane detection run:
python3 pylot.py --flagfile=configs/lane_detection.conf
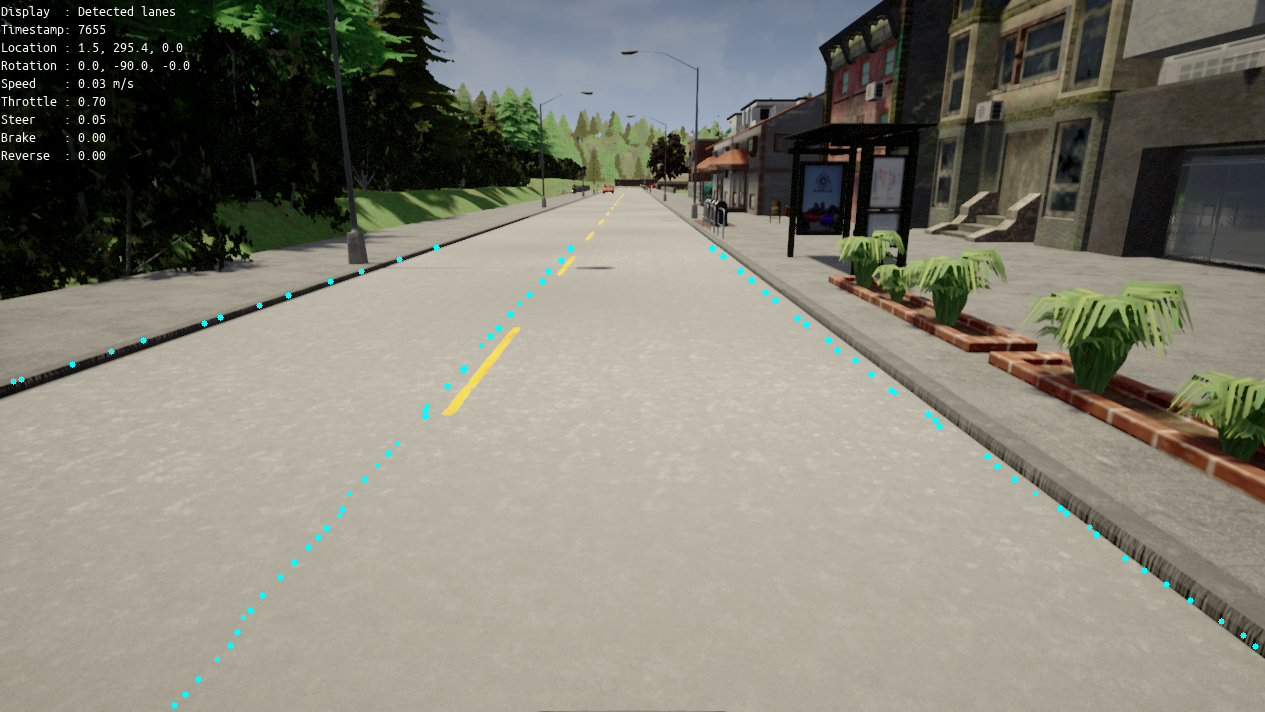
Warning: Our lane detection component works optimally with frames have a resolution of 1280x720.
Important flags¶
--obstacle_detection: Enables the obstacle detection component of the stack. Depending on accuracy and runtime requirements, the component can use different obstacle detection models. Pylot currently offers three trained models:faster-rcnn,ssd-mobilenet-fpn-640, andssdlit-mobilenet-v2.--perfect_obstacle_detection: Enables the component to use an obstacle detector which perfectly detects obstacles using ground information from the simulator.--simulator_obstacle_detection: The component outputs obstacle info that is obtained directly from the simulator.--evaluate_obstacle_detection: Compute and log accuracy metrics of the obstacle detection component.--visualize_detected_obstacles: Enables visualization of detected obstacles.--traffic_light_detection: Enables the traffic light detection component of the stack. This component attaches to the ego vehicle a forward facing camera with a narrow field of view, which the component uses to detect traffic lights.--perfect_traffic_ligth_detection: Enables the component to use a traffic light detector which perfectly detects traffic lights using ground information from the simulator.--simulator_traffic_light_detection: The component outputs traffic light ifo that is obtained directly from the simulator.--visualize_detected_traffic_lights: Enables visualization of detected traffic lights.--lane_detection: Enables the lane detection component, which currently implements a simple Canny edge detector.--lane_detection_type: Specifies which lane detection solution to use. Pylot current supports a standard vision implementation that uses Canny edge, and a neural network-based implementation that uses Lanenet.--perfect_lane_detection: Enables the component to perfectly detect lanes using information from the simulator.--visualize_lane_detection: Enables visualization of detected lanes.