Pylot¶
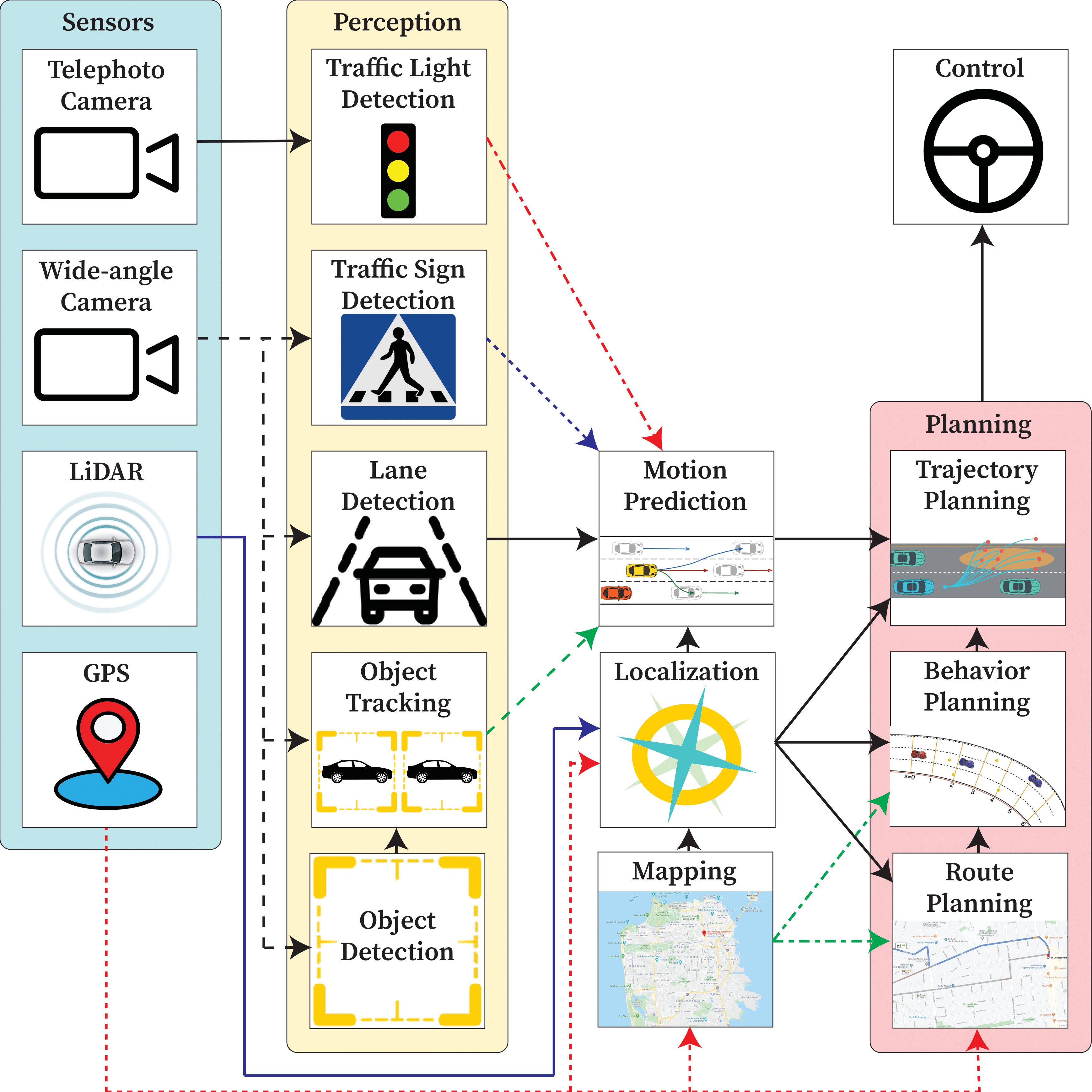
Pylot is an autonomous vehicle platform for developing and testing autonomous vehicle components (e.g., perception, prediction, planning) on the CARLA simulator and real-world cars.
More Information¶
Getting Involved¶
- GitHub Issues: For reporting bugs and feature requests.
- Pull Requests: For submitting code contributions.
Installation guide
Components
Visualization
Drivers
Deploying on a car
Data Gathering
Package Reference
- Package Reference
- Subpackages
- pylot.control package
- pylot.debug package
- pylot.drivers package
- Submodules
- pylot.drivers.carla_camera_driver_operator module
- pylot.drivers.carla_collision_sensor_operator module
- pylot.drivers.carla_gnss_driver_operator module
- pylot.drivers.carla_imu_driver_operator module
- pylot.drivers.carla_lane_invasion_sensor_operator module
- pylot.drivers.carla_lidar_driver_operator module
- pylot.drivers.carla_traffic_light_invasion_sensor_operator module
- pylot.drivers.drive_by_wire_operator module
- pylot.drivers.grasshopper3_driver_operator module
- pylot.drivers.sensor_setup module
- pylot.drivers.velodyne_driver_operator module
- Module contents
- pylot.localization package
- pylot.loggers package
- Submodules
- pylot.loggers.bounding_box_logger_operator module
- pylot.loggers.camera_logger_operator module
- pylot.loggers.chauffeur_logger_operator module
- pylot.loggers.eval_metric_logger_operator module
- pylot.loggers.imu_logger_operator module
- pylot.loggers.lidar_logger_operator module
- pylot.loggers.multiple_object_tracker_logger_operator module
- pylot.loggers.trajectory_logger_operator module
- Module contents
- pylot.map package
- pylot.perception package
- Subpackages
- pylot.perception.depth_estimation package
- pylot.perception.detection package
- Submodules
- pylot.perception.detection.detection_decay_operator module
- pylot.perception.detection.detection_operator module
- pylot.perception.detection.efficientdet_operator module
- pylot.perception.detection.detection_eval_operator module
- pylot.perception.detection.lane module
- pylot.perception.detection.lane_detection_canny_operator module
- pylot.perception.detection.lanenet_detection_operator module
- pylot.perception.detection.obstacle module
- pylot.perception.detection.obstacle_location_finder_operator module
- pylot.perception.detection.speed_limit_sign module
- pylot.perception.detection.stop_sign module
- pylot.perception.detection.traffic_light_det_operator module
- pylot.perception.detection.traffic_light module
- pylot.perception.detection.utils module
- Module contents
- pylot.perception.fusion package
- pylot.perception.segmentation package
- pylot.perception.tracking package
- Submodules
- pylot.perception.tracking.da_siam_rpn_tracker module
- pylot.perception.tracking.deep_sort_tracker module
- pylot.perception.tracking.multi_object_tracker module
- pylot.perception.tracking.object_tracker_operator module
- pylot.perception.tracking.obstacle_location_history_operator module
- pylot.perception.tracking.obstacle_trajectory module
- pylot.perception.tracking.sort_tracker module
- pylot.perception.tracking.tracking_eval_operator module
- Module contents
- Submodules
- pylot.perception.camera_frame module
- pylot.perception.depth_frame module
- pylot.perception.messages module
- pylot.perception.point_cloud module
- Module contents
- Subpackages
- pylot.planning package
- Subpackages
- Submodules
- pylot.planning.behavior_planning_operator module
- pylot.planning.messages module
- pylot.planning.planner module
- pylot.planning.planning_operator module
- pylot.planning.utils module
- pylot.planning.waypoints module
- pylot.planning.world module
- Module contents
- pylot.prediction package
- pylot.simulation package
- Subpackages
- Submodules
- pylot.simulation.carla_operator module
- pylot.simulation.perfect_detector_operator module
- pylot.simulation.perfect_lane_detector_operator module
- pylot.simulation.perfect_tracker_operator module
- pylot.simulation.perfect_traffic_light_detector_operator module
- pylot.simulation.planning_pose_synchronizer_operator module
- pylot.simulation.synchronizer_operator module
- pylot.simulation.utils module
- Module contents
- Submodules
- pylot.component_creator module
- pylot.operator_creator module
- pylot.utils module
- Module contents
- Subpackages